"Geometry is the science of pure space. Algebra is the science of pure time" (William Rowan Hamilton).
Vectors
Semantics
A n-dimensional vector is a linear combination of n basic elements e1, e2, ... , en, i.e., the sum of the basic elements each affected by a coefficient (a real number): r1e1 + r2e2 + … + rnen
This definition is entirely general. But when the basic elements are oriented segments in the Euclidean n-dimensional space, a vector is interpreted as an oriented line segment whose projections on the axes (associated with the basic elements) are the coefficients of the linear combination:
A vector in 1D space (one dimension) is a linear segment oriented on the real line and represented by the magnitude a1 *e1, where a1 is the quantity (positive or negative) and e11 is the unit segment.
A vector in 2D space (two dimensions) is an oriented linear segment with projections on the axes a< sub>1*e1 y a2*e2, respectivamente.
In general, a vector in the space nD (n dimensions) is a linear segment oriented and of projections on the axes a1*e1, ... , an*en.
Syntax
vector in 1D: a1*e1
vector in 2D: (a1*e1 + a2*e2)
3D vector: (a1*e1 + a2*e2 + a3*e3)
...
vector in nD: (a1*e1 + ... + an*en)
The formal definition of vector does not specify that it is a geometric element. The geometric interpretation is the usual one, but in MENTAL the expressions ai and ei could be any.
The alternative syntax avoids having to specify the linear combination each time, since it is sufficient to specify the coefficients of the linear combination. This notation can, of course, be replaced by any other notation. For example, using v as qualifier, as in (a1 a2)/v. The notation chosen corresponds to vector as a function of its components.
In the definition of the alternative syntax, potential substitution is used, indicating that it is a representation.
Sometimes it is more convenient to use the direct representation, which avoids specifying zeros, such as 27*e4, instead of v(0 0 0 0 27).
The basic vectors e1, ... , en, as well as v, could be specified in italics to differentiate them from ordinary variables.
The elements e1, ..., en are also called basic vectors or generators, since by linear combination of them all possible vectors are obtained. One has:
(v(1) =: e1) (v(0 1) =: e2) (v(0 0 1) =: e3)
etc.
According to the definition, if the vectors have different lengths, zeros are assumed to the right of the shortest vector. For example,
Commutative with respect to a factor.
⟨( r*v = v*r )⟩
Associative,
⟨( (v1+v2)+v3 ≡ v1+(v2+v3) )⟩
Distributive.
⟨( r*(v1 + v2) ≡ (r*v1 + r*v2) )⟩
⟨( (v1 + v2)*r ≡ (v1*r + v2*r) )⟩
⟨( (r1 + r2)*v ≡ (r1*v + r2*v) )⟩
⟨( v*(r1 + r2) ≡ (v*r1 + v*r2) )⟩
Counter vector.
⟨( −v ≡ (−1)*v )⟩
zero vector.
⟨( v(0) = 0 )⟩
⟨( v−v = 0 )⟩
Vectors of higher order
A vector can, of course, contain other vectors. The vectors described so far are of order 1. Scalars (numbers) are often referred to as zero-order vectors. A vector containing a vector of order 1 is of order 2. In general, a vector containing a vector of order n is of order n+1. Examples:
The inner product of two vectors v1 and v2 is the algebraic or arithmetic product of both vectors, but with the interpretation of the product of the basic vectors ei*ej as the projection of the vector ei onto the ej (or vice versa). In Euclidean space, since the basis vectors are perpendicular to each other, then (ei*ej = 1) if < code>i=j and (ei*ej = 0) if i≠j.
For vectors of order 1, the inner product is called the "scalar product" and is the sum of the products of the corresponding components of both vectors.
Syntax
Since this is an attribute of the product operation, we can symbolize it by the expression (v1 */i v2), which indicates inner vector product of the vectors v1 and v2.
Definition
⟨( v1 */vi v2 = (v1*v2)/Proy )⟩
with Proy being the "projection" interpretation, ie:
( Proy = ⟨( (ei*ej = (1 ← i=j →' 0) )⟩ )
The Kronecker delta function is defined as follows:
⟨( δ(ij) = (1 ← i=j →' 0) )⟩
Therefore,
⟨( (v1 */vi v2) = v1*v2/(ei*ej = δ(ij) )⟩
Examples
The result is a scalar.
(v(1 2 3) */vi v(4 5 6)) // ev. (1*4 + 2*5 + 3*6) ev. 32
The result is a vector.
(v(1 2) v(3 4)) */vi v(5 6) // ev. ((v(v(1 2))*5 + (v(3 4))*6) ev. (v(5 10) + v(18 24)) ev. v(23 34)
Remarks
The inner product of two perpendicular vectors in Euclidean space is the scalar zero. For example, in 2D, the inner product of the vector v(a b) by the one rotated 90º (counterclockwise), which is v(−b a), is zero:
(v(a b) */vi v(−b a)) // ev. 0
The inner product of a vector of order n by another vector of level 1 is a vector of order n−1.
The expressions used ei*ej = 0 or 1, and the Kronecker delta function are imaginary, according to the definition of imaginary expression in MENTAL.
Distribution with respect to sum.
⟨( (v1 */vi (v2+v3)) ≡ ((v1 */vi v2) + (v1 */vi v3))) )⟩
The inner product of a vector by zero is zero.
⟨( (v */vi 0) = 0 )⟩
Module of a vector
By definition, the modulus of a vector v of order 1, which we can represent by mod(v), is:
⟨( mod(v) = (v */vi v)V2 )⟩
(recuérdese que xvn es n√x)
Example: mod(v(3 4)) // ev. 5
The modulus of a vector of order 1 corresponds to its length in the space nD, according to the Pythagorean theorem: the square root of the sum of the squares of the components AND the Cauchy-Schwarz property is also satisfied:
⟨( v1 */vi v2 ≤ mod(v1)*mod(v2) )⟩
Outer Product of Two Vectors
Semantics
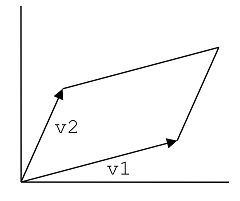
The outer product of two vectors v1 and v2, in the space nD, is the algebraic or arithmetic product of both vectors, but with interpretation of the product of the basic vectors < code>ei*ej as the surface of the parallelogram formed by the vectors ei and ej. The surface is oriented, that is, it has sign, with the following criterion: if i<j, then the surface is ei*ej. If i>j, then ei*ej is −(ej*ei). Evidently, (ei*ei = 0).
Syntax
Since this is an attribute of the product operation, we will symbolize it by the expression (v1 */ve v2), which indicates the outer vector product of the vectors v1 and v2.
The result is a magnitude of quantity (a1*b2 − a2*b1) and unit (e1*e2). The quantity represents the area of the parallelogram formed by the two vectors (see figure). The quantity is also the value of the determinant:
In general, the outer product of two vectors in the space nD is the sum of the projections of the parallelogram formed by the two vectors on the planes corresponding to the combinations of the n basic elements taken 2 by 2.
Properties
The outer autoproduct is zero.
⟨( (v */ve v) = 0 )⟩
The traditional interpretation in 3D space of the product of two vectors is another vector perpendicular to both and of sense governed by the corkscrew law. And the product of unit vectors is:
e1e2 = e3,
e2e3 = e1e3e1 = e2
These laws are the same that govern Hamilton quaternions: ij = k, jk = i, ki = j. In fact, the vector concept comes historically from quaternions.
Multivectors
Semantics
The concept of multivector generalizes two things: on the one hand, the concept of vector, and on the other hand the outer product of two vectors, extending it to any number m of vectors, being 1≤m≤n and n the dimension of the space.
A 0-vector is a scalar (number).
A 1-vector is a traditional vector (oriented linear segment).
A 2-vector (or bivector) is an oriented plane segment.
A 3-vector (or trivector) is an oriented volume segment.
A m-vector is a hypervolume segment of dimension m oriented.
Basic multivectors
A multivector of order m is expressed as a linear combination of the basic multivectors of order m. For example, in 3D space, we have the following basic multivectors:
Of order 1, they correspond to the three one-dimensional subspaces (1, 2 and 3): e1e2e3
Of order 2, correspond to the three two-dimensional subspaces (1-2, 1-3 and 2-3): e1*e2e1*e3e2*e3
Of order 3, correspond to the space of dimension 3: e1*e2*e3. It is verified that:
e2*e3*e1 = e3*e1*e2 = e1*e2*e3
e1*e3*e2 = e3*e2*e1 = e2*e1*e3 = −e1*e2*e3
That is, the circular permutations are equal.
Basic multivectors are also usually represented by the letter e followed by the component numbers. For example:
We have seen that the outer product of two vectors in 2D space is the surface formed by these vectors is a magnitude whose quantity is the value of a determinant of order 2, and whose unit is e1*e2. It corresponds to a 2-vector (bivector). Similarly, the outer product of three vectors (trivector) (a, b and c) in 3D space captures the volume of the space of the parallelepiped formed by these vectors, whose quantity is equal to the value of the determinant of order 3:
|a1
a2
a3|
|b1
b2
b3|
|c1
c2
c3|
and whose unit is e1*e2*e3.
In general, the hypervolume enclosed by m vectors v1, ... ,vm in the space nD is the determinant of order m. It is the so-called "Gauss formula". It corresponds to the multivector (m-vector) (v1 */ve ... */ve vm) in the space nD (being m≤n). Abbreviated:
(*/ve)⊣(v1...vm).
Numbers vs.Vectors
Compound numbers as vectors
A composite number, for example, n=(7 12 54 3), whose normalized value n. (n with a decimal point) is
(7*(10^3) + 12*(10^2) + 54*10 + 3) ev. 8743
behaves, for all intents and purposes, as a vector. In effect:
is a linear combination of basic expressions. The basic expressions are:
e1=1, e2=10, (e3 = 10^2), and so on. In general, ⟨( ei = 10^(i−1) )⟩
It satisfies all the properties of a vector space. In particular, it satisfies the distributive property with respect to multiplication by a factor:
In vectors, basic vectors are numbered from left to right. In numbers it is the other way around: they are numbered from right to left. Therefore, the basic components of a number that do not exist on the left are zero.
Numbers with the decimal point on the left are also vectors.
Higher-order numbers (those composed of two or more levels) work analogously.
Vectors in Functions
With vectors you can define functions in which the arguments and/or the result can be vectors.
⟨( v(t) = v(tt+1 t+2))⟩ // velocity (vector) as a function of time (scalar)
v(10) // ev. v(10 11 12)
⟨( f(v(r1r2r3)) = v(r1+r2r1+r3r2+r3)) )⟩
The argument v(r1 r2 r3) is a vector representing a point in 3D space. The result is another vector. In this case we have what is called a "vector field".
f(v(2 3 4)) // ev. v(2+3 2+4 3+4) ev. v(5 6 7)
⟨( f(f(v(xyz)) = (x*a + y*b + z*c) )⟩
Function that assigns to each vector a scalar.
f(v(2 3 4)) // ev. 2*a + 3*b + 4*c
Addenda
Physical quantities
Physical quantities can be scalar or vector.
A scalar quantity is one that can be represented by a single numerical value (together with its corresponding unit), e.g., mass, temperature, etc., and is independent of the coordinate system used.
A vector quantity needs, in addition to a numerical value (and also its corresponding unit) its direction in space, e.g. velocity, force, electric field, magnetic field, etc. The simplest and most uniform way to represent a vector is by a sequence of numbers, which correspond to the components of the vector with respect to each dimension of space. A vector can be considered as a "directed number", as a "supernumber" or as a "multidimensional number".
Bibliography
Anton, Howard. Elementary Linear Algebra (Applications Version). Wiley International, 2005.
Crowe, M.J. A History of Vector Analysis. Dover, 1994.
Halmos, P.R. Finite-Dimensional Vector Spaces. D. van Nostrand, 1958. (Pese a su antigüedad, es uno de los mejores libros sobre espacios vectoriales finito-dimensionales. Está escrito en un estilo simple y coloquial.)
Bretscher, Otto. Linear Algebra with Applications. Prentice Hall, 2004.
Kemmer, N. Análisis vectorial. Editorial Reverté, 2004.